![]()
Payload Support Operations
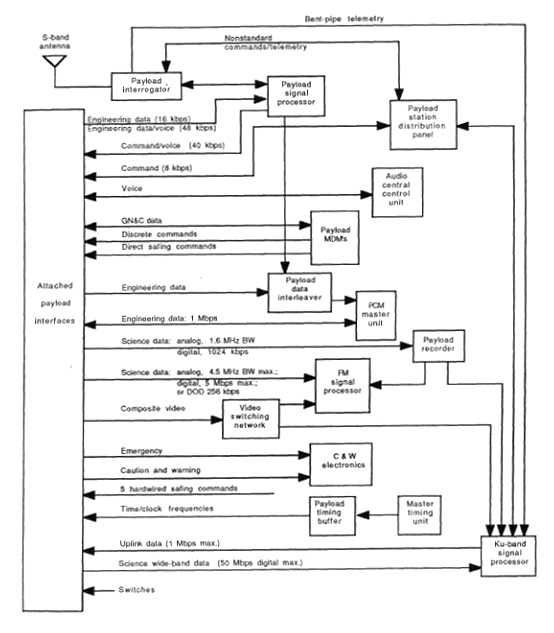
The Orbiter avionics system is configured to provide an extensive, flexible catalog of services to both attached and detached payloads which can be readily tailored to the unique requirements of a given mission or manifest. To a large extent, these services are provided through interface devices which allow access to and utilization of many of the inherent hardware and software capabilities of the avionics system. Figure 4-44 is a simplified functional overview of the avionics components involved in payload support along with the various command, data, and other interfaces available. Refer to the system block diagram for the actual component redundancy, wiring, and data bus utilization. The payload interrogator and payload signal processor devices, which provide RF command and data acquisition services to detached payloads, and the audio and television capabilities provided to attached payloads were discussed in the Communications and Tracking section. Also treated previously were the various command, voice, and data transmission services provided to payloads by the S-band and Ku-bahd space/ground communications links. In this subsection, other standard services provided — such as engineering data acquisition, command generation, caution and warning, recording, GN&C data, time, and system management — are discussed. It should be noted that the hardware and software capabilities provided for a given mission and payload manifest may vary widely from those discussed in general here; therefore, mission documentation should be addressed if that level of detail is desired.
Figure 4-44. - Payload interfaces.
Two of the 28 data buses in the data processing system are designated for payload operations. Two payload MDM's, PF1 and PF2, are permanently installed on these buses, and, although they are used for other purposes as well, they provide the prime interface for computer support. Wiring and other provisions are included for additional "flex MDM's" to be installed in the payload bay, also connected to the payload buses. Flex MDM's are designed to be easily reconfigurable to meet varying payload requirements. The MDM's provide a direct interface, through the payload umbilicals, for commands and data; PF1 and PF2 also provide the interface with the PSP for standard commands and with the PSDP for nonstandard commands. The standard real-time command (RTC) processing capabilities of the DPS are used.
Engineering data are acquired in the payload data interleaver, which has the capability to accept as many as five data channels from attached payloads and one, through the PSP, from a detached payload. These data are then interleaved and transmitted to the PCM master unit to become part of the telemetry bit stream. The PDI data acquisition format and content are controlled by the DPS using loads prestored on mass memory. A dedicated payload recorder is provided and is accessed either directly from attached payloads or through the PSDP. Data playback capability is provided through either the FM or the Ku-band signal processor.
Hardwired interfaces are included for caution and warning parameters and safing commands. Backup C&W and standard system management services are provided . by SM software, in the BFS computer during ascent and entry arid in whichever machine is loaded with the SM2 OPS on orbit. Vehicle state vector and attitude information is calculated in the GNC computers and transferred by way of the intercomputer buses to the SM machine for retransmission to a payload.
Home -
NASA Office of Logic Design
Last Revised: February 03, 2010
Digital Engineering
Institute
Web Grunt: Richard
Katz