![]()
Avionics System Functions
The Space Shuttle avionics system is an integral part of all mission operations from well before lift-off to after landing. In this subsection, these operations are discussed from an overall avionics viewpoint in preparation for the subsystem and function descriptions which follow.
Ground Checkout and Prelaunch Operations
The ground-based launch processing system has primary responsibility for all ground checkout and prelaunch operations until 30 seconds before lift-off (T - 30). The LPS, however, makes extensive use of the onboard system both in the actual conduct of tests and in the gathering of data pertinent to the operation. A command processor called the test control supervisor (TCS) provides the capability for ground control. Examples of tests which are mechanized largely onboard are the flight readiness test, IMU calibration and alignment, dedicated display checkout, and various actuator drive tests. At T - 30 seconds, control of the launch sequence is passed onboard and the avionics system has primary responsibility. Functions performed include final system initialization and go/no-go assessment, ignition of the Space Shuttle main engines (SSME's) and the SRB'S, and the sequence by which the vehicle is released from ground attachment.
Ascent Phase
The Space Shuttle ascent configuration and the control effectors used are shown in figure 4-3. A profile of the ascent trajectory is contained in figure 4-4. All Space Shuttle ascent events and dynamic guidance and control are provided by the Orbiter avionics flight software. Between lift-off and SRB staging, the vehicle is guided by stored roll, yaw, and pitch profiles, which adapt for performance variations caused by SRB temperature changes. Thrust vector control is performed using the three main engines on the Orbiter and the two SRB engines. During the maximum dynamic pressure region, the SRB thrust is programmed by propellant shaping to decrease temporarily, and the SSME's are throttled as necessary to prevent exceedance of the 3g structural limit. The elevons also are adjusted as required to relieve aerodynamic structural loads on the Orbiter. After SRB separation, a powered explicit guidance algorithm is invoked by which the vehicle is guided to the desired trajectory conditions at main engine cutoff (MECO). The reaction control system (RCS) thrusters are used to control. the vehicle after MECO. Separation from the ET is followed by performance of one or two orbital maneuvering system (OMS) translation maneuvers, as required, to achieve the final orbit. Abort capabilities exist throughout the ascent phase covering contingencies such as loss of main engines. Depending on the time of occurrence, the abort may require a return to the launch site, a diversion to a landing in Europe or Africa, a one-orbit diversion to a landing at Edwards Air Force Base or White Sands, or an abort to orbit. In addition to the guidance, navigation, and control (GN&C) functions described previously, the system performs a number of critical ascent vehicle management and sequencing services including
- SRB separation and range safety system safing
- RCS quantity gauging
- Orbiter vent door control
- External tank separation
- Main propulsion system propellant-dump control
- OMS propellant crossfeed and system reconfiguration
Figure 4-3. - Ascent control effectors.
Figure 4-4. - Ascent trajectory.On-Orbit Phase
After orbital insertion, the GN&C system maintains Orbiter attitude and translation control as required using the RCS and OMS capabilities. The IMU's are aligned periodically using the star trackers to measure the azimuth and elevation of available stars selected from a catalog maintained in the software. The GN&C subsystem navigates during the orbital phase by propagating the state vector forward using the known orbital parameters and any velocity changes sensed by the IMU's, including planned maneuvers.
Periodically, the onboard state vector is updated by the ground control network using the communications uplink. Rendezvous guidance and navigation capability is provided using the Ku-band radar as the primary external sensor, Provisions are included for supplying support information to payloads including state vectors, vehicle attitude and rate data, and instrument pointing vectors. During the on-orbit phase, the full redundant-set computer configuration normally is not used, and the GN&C functions are performed from a dual computer setup. Other avionics system services include control of the payload bay door open/close sequences and a number of system monitoring and control functions and payload support functions.
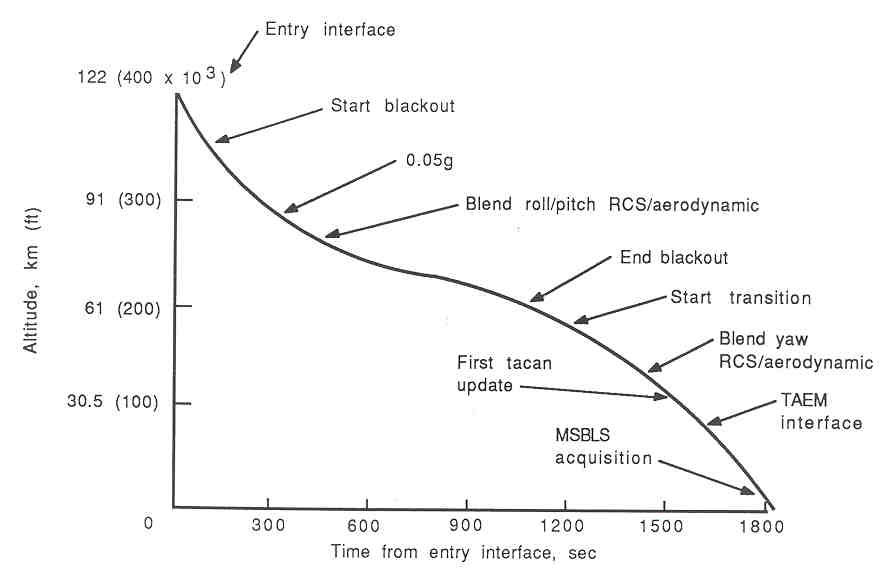
Entry Phase
The entry phase begins before the performance of the deorbit propulsive maneuver and continues down to the terminal area energy management (TAEM) interface at an altitude of approximately 25.3 kilometers (83 000 feet) (fig. 4-5). Attitude control is maintained using the RCS thrusters only until the aerodynamic control surfaces become effective; then, a blend of aerosurface and RCS control is used. The air data probes are deployed following the entry heat pulse; thereafter, flight control gains are scheduled based on measured air data. The entry guidance function modulates angle of attack and bank angle to control the Orbiter g-load, heat pulse, and landing footprint.
Figure 4-5. - Entry trajectory.
Entry navigation is performed using IMU-sensed inputs until tactical air navigation (tacan) data become available. Before the tacan data are incorporated into the system, an accuracy assessment is made on the ground by comparing them with radar tracking data. Non-GN&C critical functions performed during entry include
- OMS propellant crossfeed and system reconfiguration
- RCS propellant quantity gauging
- Orbiter vent door control
- OMS/ RCS propellant dumps
TAEM Phase
The TAEM phase begins at approximately 760 m/sec (2500 ft/sec) entry velocity and continues down to the runway approach interface at an altitude of approximately 610 meters (2000 feet) (fig.4-6). The TAEM guidance algorithm steers the vehicle to tangency with a navigation-derived heading alignment cylinder projection, which intersects the final landing approach trajectory. Energy is controlled by performing S-turns and by adjusting speed brakes. Both tacan and microwave scanning beam landing system (MSBLS) data are used as appropriate for navigation. Non-GN&C vehicle services include
- RCS propellant quantity gauging
- Orbiter vent door control
Figure 4-6. Terminal area energy management
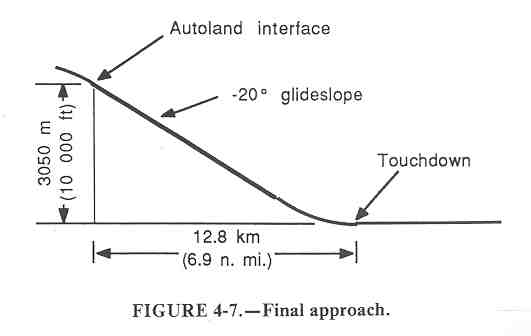
Approach and Landing PhaseThe final approach trajectory is shown in figure 4-7. The MSBLS and the IMU's serve as the navigation sensors. Below an altitude of 1524 meters (5000 feet), radar altimeter data are displayed for monitoring purposes. Although full autoland capability is available, the normal procedure is for the crew to assume manual control before the flare maneuver leading to the shallow glideslope. When in manual mode, the system continues to compute and display steering commands to the desired flightpath. A heads-up display (HUD) is used to superimpose trajectory monitoring and dynamic flight data on the out-the-window view. Non-GN&C vehicle services include
- RCS propellant quantity gauging
- Orbiter vent door control
- Landing gear isolation valve control
Figure 4-7. - Final approach
General Mission FunctionsIn addition to the mission-phase-oriented functions described previously, a number of services which apply throughout the mission are performed by the avionics system. The instrumentation subsystem gathers data from all vehicle systems to be used by the onboard system management and caution and warning functions and/or to be telemetered to the ground support network for monitoring and performance evaluation. The communications subsystem provides a number of services including two-way space/ground voice and data links, television, intercom, and extravehicular and payload links. These services are discussed in the Communications and Tracking section. The avionics system also provides distribution and control of electrical power for all vehicle systems.
Home -
NASA Office of Logic Design
Last Revised: February 03, 2010
Digital Engineering
Institute
Web Grunt: Richard
Katz